The S.P.R.K. project
You can read more about the controls here!
What is S.P.R.K.
The name originaly was SHARK, but we felt that a more fitting name would be S.P.R.K. as an actual acronym. It is short for Self Propelled Robot with Kinematics. It was built for my cybersecurity class senior capstone project.
Design Process
Prototyping
Originally, the base was made up of four sheets of aluminum rivited together. The motors were mounted using custom 3D printed mounts and bolted in to the base plate. No nuts were used, as the sheets of aluminum acted as threads for the bolts.
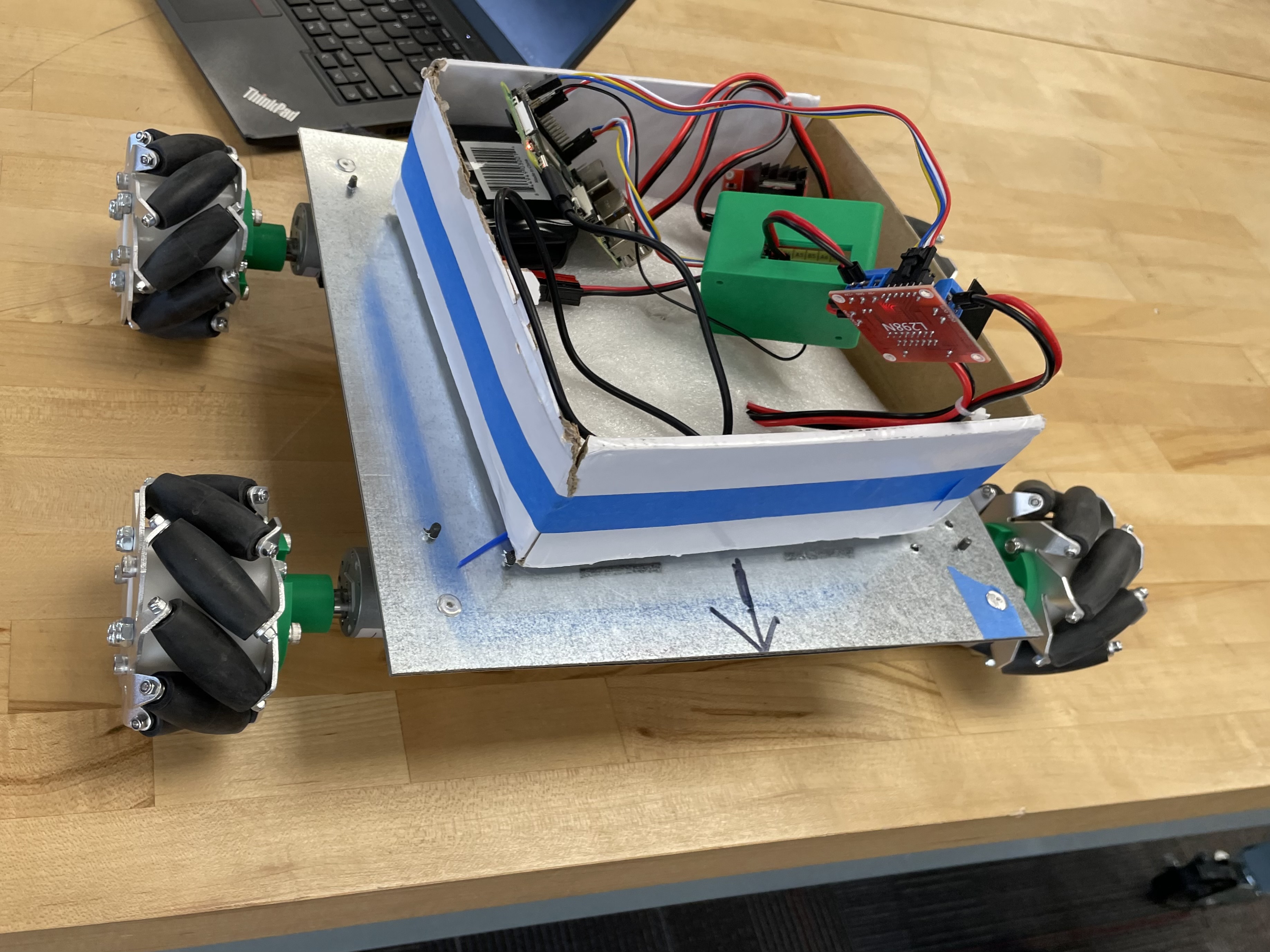 Prototype with working drivetrain
Prototype with working drivetrain
CAD & Renders
This project greatly improved my Fusion 360 skills. For fun, I used the built-in renderer to generate images of our robot.
 Render of SPRK in Fusion 360
Render of SPRK in Fusion 360
Final Design
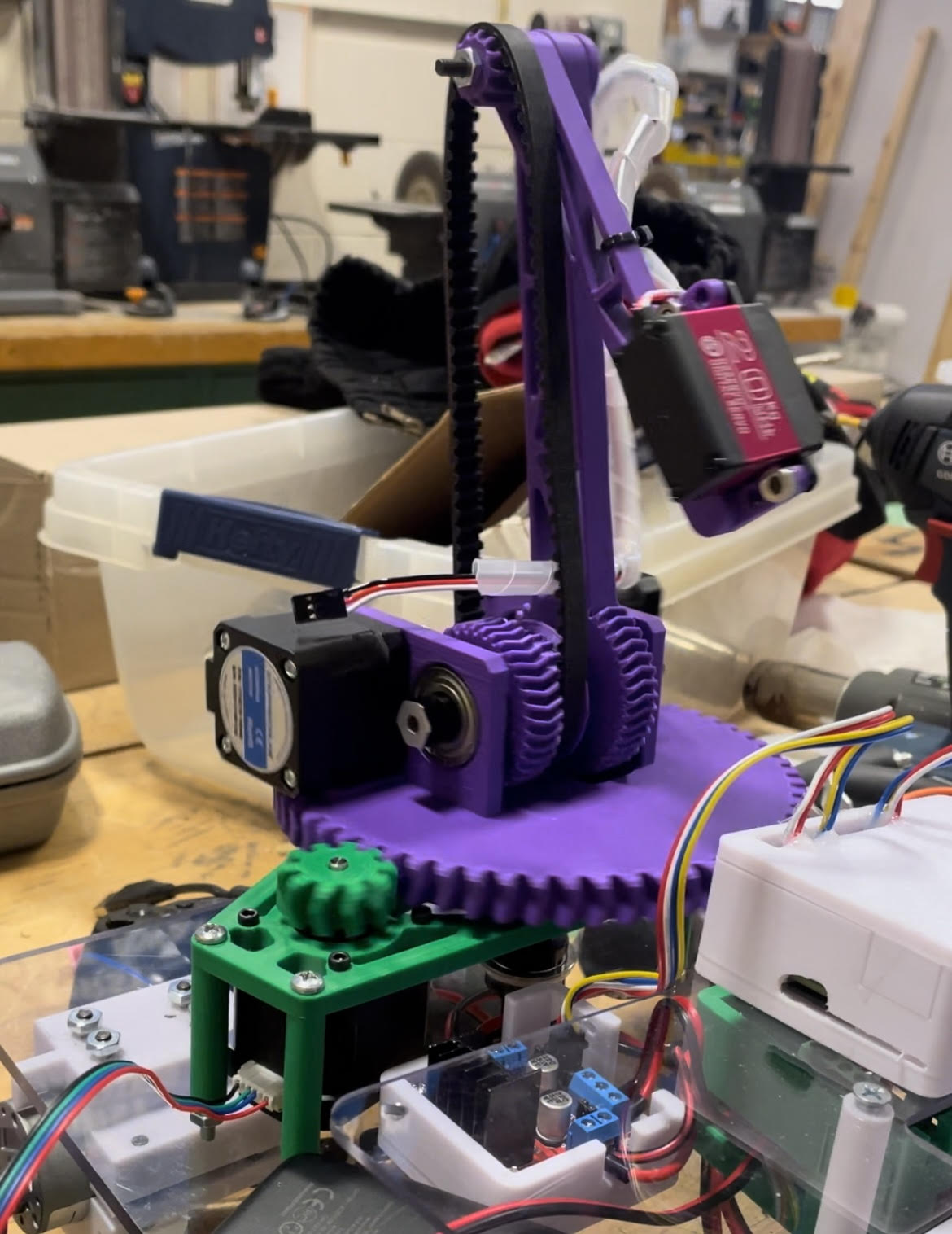
Every part was designed and assembled in Fusion 360 before fabrication. The final baseplate was CNC’d out of quarter-inch thick polycarbonate plastic. The top plate holding the electronics was also CNC’d out of eigth-inch thick polycarb as well. Every other custom part was 3D printed with standard PLA filament.
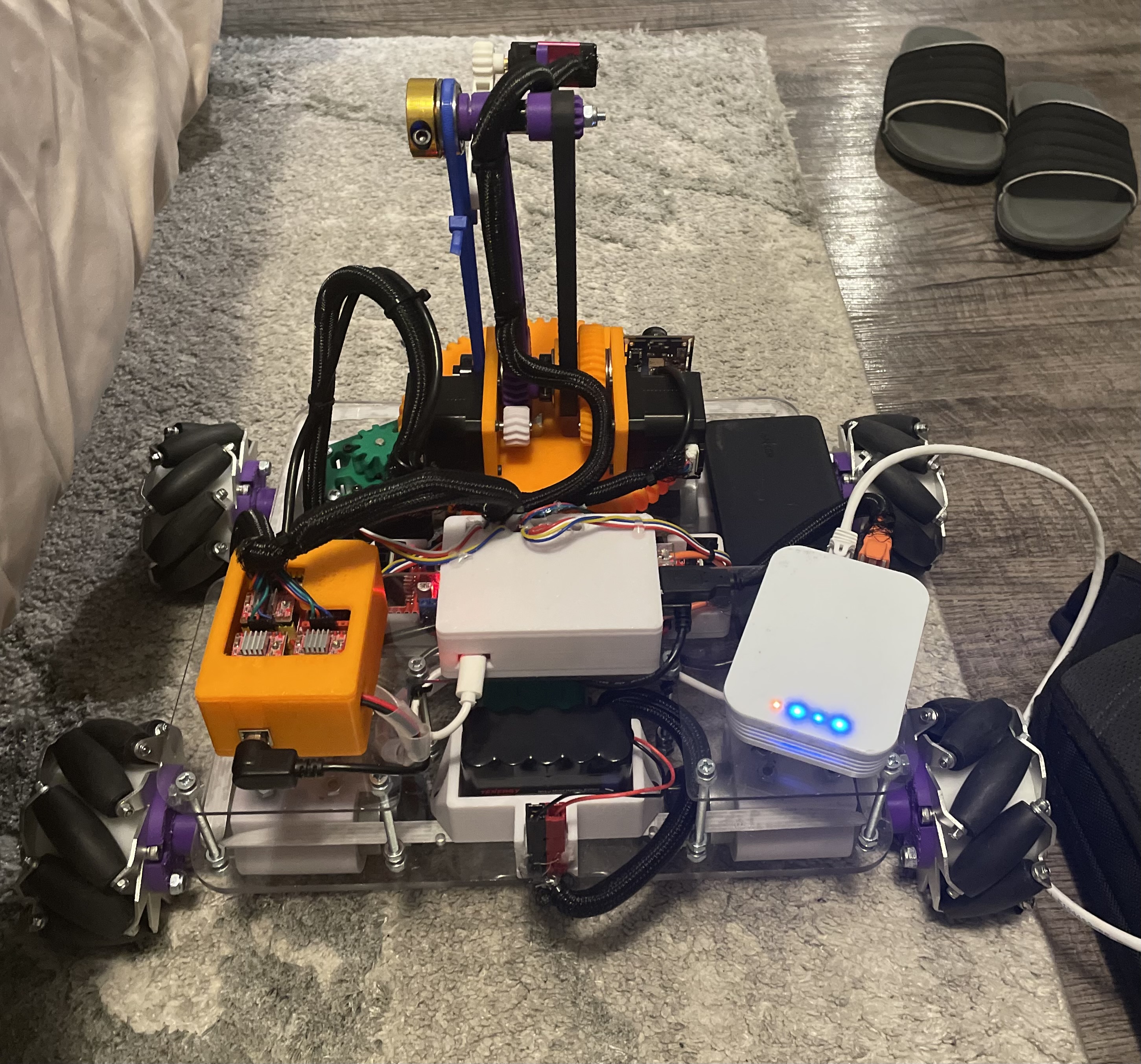 Almost final version of SPRK
Almost final version of SPRK
Further Improvements
After a few months away from SPRK development, I decided to revisit the project and make a few improvements. Check out my latest post about these improvements here.